Given a vector bundle (E,M,Kn), the frame bundle of E is the principal GL(n,K)-bundle associated to E, and is denoted F(E)≡(F(E),M,π,GL(n,K)). The elements p∈π−1(x) are viewed as ordered bases of the internal space Vx≅Kn, which we denote
p≡ep,
or epμ if operated on by a matrix in index notation. Each trivializing neighborhood Ui is associated with a fixed frame ei, which we take from the local trivializations in the vector bundle E, letting us define fi:π−1(x)→GL(n,K) by the matrix relation
ep=eifi(p).
In other words fi(p) is the matrix that transforms (as row vectors) the fixed basis ei into the basis element ep of F(E); in particular, the identity section is
σi=f−1i(I)=ei,
where I is the identity matrix. If we again write vector components in these bases as vμieiμ=vμpepμ=v, then we have
vμi=fi(p)μλvλp.
The left action of gij is defined by fi(p)=gijfj(p), and applying both sides to vector components vμp we get
vμi=(gij)μλvλj,
the same transition functions as in E. The transition functions can be viewed as changes of frame ej=eigij, or gauge transformations, between the identity sections of F(E) in Ui∩Uj, i.e. this can be written as a matrix relation
σj=σigij,
which as we see next is the usual right action of the transition functions on identity sections.
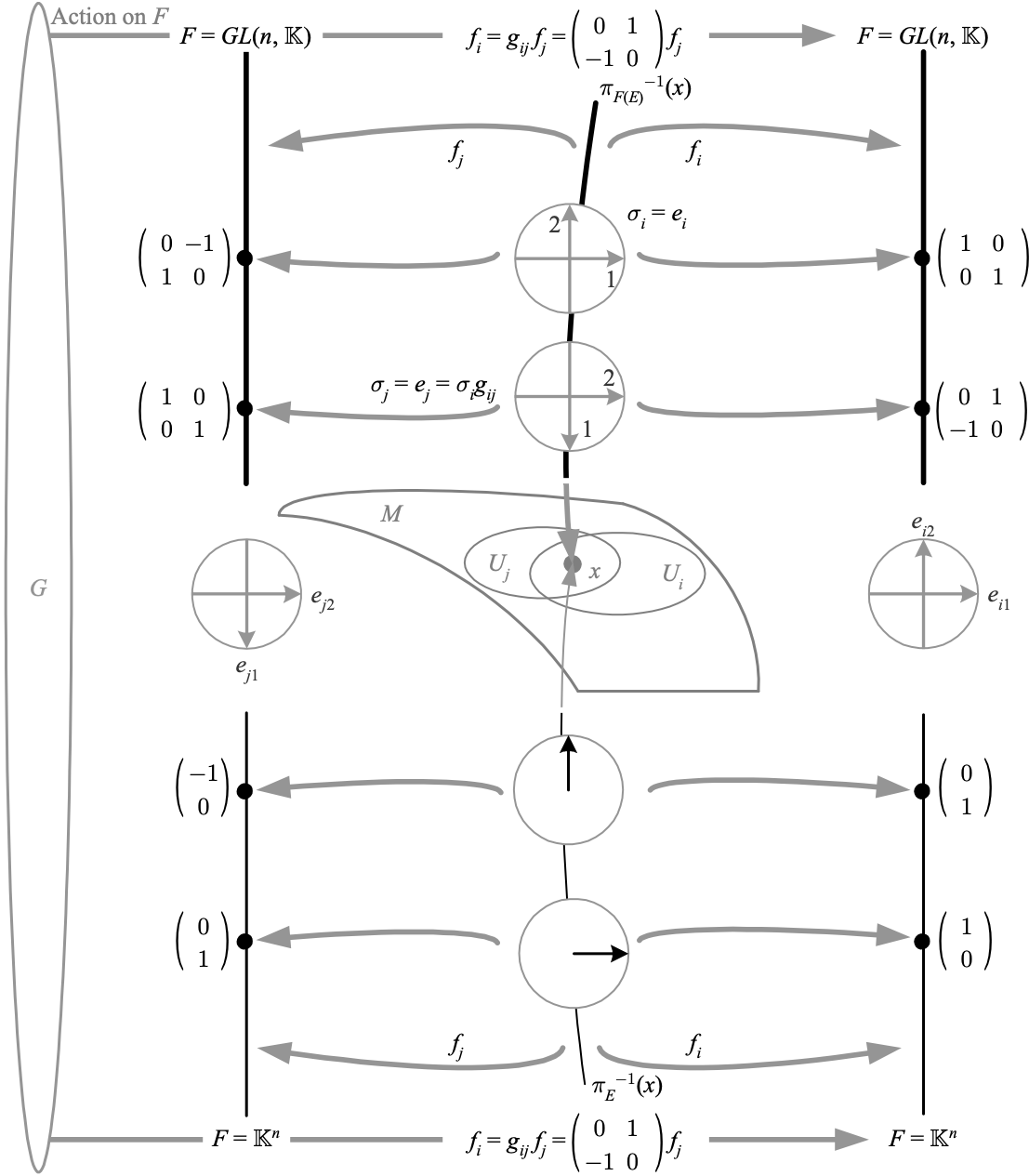
The above depicts how given a vector bundle E, we can construct an associated frame bundle F(E). The elements of the fiber over x in the frame bundle can be viewed as bases for the internal space, with the local trivialization acting as a choice of a fixed basis against which linear transformations generate these bases. These fixed bases are the same as those chosen in the corresponding local trivialization on the vector bundle, and are acted on by the same transition functions. Although denoted identically, the fi are those corresponding to each bundle.
| Δ Unlike with E, the frame is in fact part of the bundle F(E), but vectors and vector components are not. The left action of gij on the abstract fiber GL(n,K) is equivalent to a transformation in the opposite direction from the fixed frame in Ui to the fixed frame in Uj, which is a right action on the identity sections from σi=ei to σj=ej. |
| Δ It is important to remember that the elements of π−1(x) in F(E) are bases of the vector space Vx, and in a given trivializing neighborhood it is only the basis in the identity section that is identified with the basis underlying the vector components in the same trivializing neighborhood of E. |
The right action of g∈GL(n,K) on π−1(x) is defined by fi(g(p))=fi(p)g, and applying both sides to ei from the right and using ep=eifi(p) we immediately obtain
eg(p)=epg,
so that the right action of the matrix g is literally matrix multiplication from the right on the basis row vector p=epμ. Alternative ways of writing this relation include
eg(p)μ=epμgμλ,g(p)=pg.
In particular, if fi(p)=g then we have
p=ep=eig=g(ei)=eg(ei).
| ◊ Note that since the right action on π−1(x) is by a fixed matrix, it acts as a transformation relative to each ep, not as a transformation on the internal space Vx in which all of the bases in π−1(x) live. As a concrete example, if g00=1 and gλ≠00=0, then eg(p)0=ep0, meaning that the transformation p↦g(p) leaves the first vector of all bases in π−1(x) unaffected, regardless of that vector’s direction. This behavior contrasts with that of a transformation on Vx itself, which as we will see in the next section is a gauge transformation. |